半导体机械手臂与陶瓷吸盘的配合,核心是通过“精准定位+稳定吸附+无损转运”的协同逻辑,适配半导体制造中晶圆等薄脆工件的严苛处理需求(如减薄、划片、检测等工序),二者依托结构适配、动力联动和精度控制,实现微米级的高效、洁净转运,是保障芯片制造良率的关键环节之一,其配合逻辑贯穿“准备-吸附-转运-释放”全流程,且需满足超洁净、低损伤、高稳定的行业要求。
一、配合基础:结构与材料的适配性
二者的配合首先依赖结构设计与材料特性的高度匹配,从根源上避免工件损伤、吸附失效和污染问题,这也是半导体制造的核心前提:
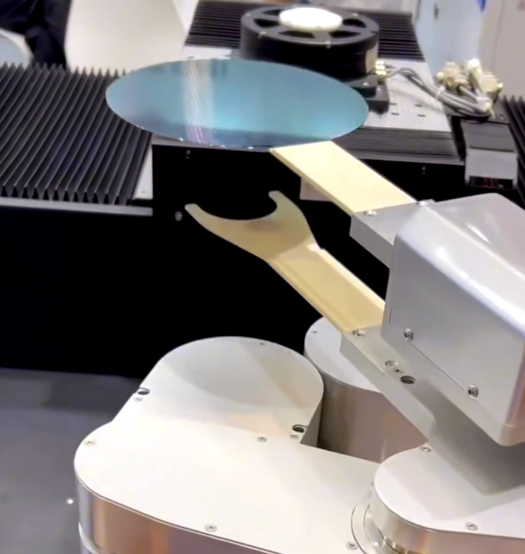
• 机械手臂的适配设计:半导体机械手臂(多采用陶瓷或陶瓷-金属复合结构)的末端执行器(片叉)会预留专用安装位,用于固定陶瓷吸盘,安装精度需控制在微米级,避免吸盘偏移导致吸附受力不均。同时,机械手臂内部会嵌入真空管路,与陶瓷吸盘的气道精准对接,管路采用并联设计,可单独控制每个吸盘的真空度,适配不同尺寸、翘曲程度的晶圆,且管路隐藏式设计能防止颗粒污染和气体泄漏。此外,机械手臂末端会做轻量化处理,搭配高精度驱动单元,确保移动、旋转时无震动,避免影响吸盘的吸附稳定性。
• 陶瓷吸盘的适配特性:陶瓷吸盘(多采用氧化铝、氮化硅、碳化硅等高性能陶瓷)凭借自身特性与机械手臂形成互补——其表面经过精密抛光,平面度达微米级,可与晶圆完美贴合;密集的微米级微孔能将吸附力均匀分散,避免薄脆晶圆局部变形或损伤;陶瓷材料耐高温、耐磨损、不导电、无颗粒脱落,既能适配半导体制造中的复杂工艺环境,又能防止静电击穿晶圆或颗粒污染工件,与机械手臂的洁净度、稳定性需求高度契合。同时,吸盘上表面会突出机械手臂片叉表面1mm-2mm,防止晶圆直接接触片叉导致划痕或吸附印记。
二、配合流程:全环节协同联动
二者的配合是动态协同的过程,每个环节紧密衔接,全程由控制系统精准调控,确保转运安全高效,具体流程如下:
1. 准备阶段:精准对位:机械手臂接收控制系统指令后,通过自身的视觉定位、激光对准模块,移动至晶圆存放位置(如晶圆盒、加工台),调整姿态使末端的陶瓷吸盘与晶圆表面保持平行,对位误差控制在±50nm以内,同时确保吸盘吸附区域避开晶圆的有效电路区域,防止损伤芯片结构。对于不同尺寸的晶圆,可通过调整吸盘位置(如滑动式吸盘设计),使三个吸盘呈特定夹角(30°-90°可调),增强承托稳定性,降低真空泄漏概率。
2. 吸附阶段:负压锁止:对位完成后,机械手臂内部的真空系统启动,通过预埋管路向陶瓷吸盘输送负压,利用吸盘表面微孔产生的大气压力,将晶圆牢牢吸附在吸盘表面。此时,真空传感器实时监测负压值,反馈给控制系统,确保吸附力处于预设范围——力度过大易导致晶圆破损,过小则可能在转运中滑落;同时,并联设计的真空管路可根据晶圆翘曲情况,灵活调整单个吸盘的吸附力,进一步降低真空泄漏风险,适配不同翘曲程度的晶圆。
3. 转运阶段:稳定同步:吸附确认后,机械手臂按照预设轨迹(直线、旋转等)进行转运,全程保持匀速、平稳,避免加速、减速过快产生惯性力,导致晶圆偏移或脱落。转运过程中,机械手臂的姿态传感器与吸盘的真空传感器实时联动,若检测到真空度下降或姿态偏移,立即暂停转运并调整,确保吸附状态稳定。同时,陶瓷吸盘的耐高温、耐腐蚀性的特性,可适配刻蚀、薄膜沉积等复杂工艺环境下的转运需求,无需额外防护即可长期稳定工作。
4. 释放阶段:精准卸载:机械手臂将晶圆转运至目标位置(如加工台、检测台)后,调整姿态使晶圆平稳贴合目标台面,随后控制系统发出指令,真空系统泄压,陶瓷吸盘的吸附力消失,机械手臂缓慢撤离,完成一次转运。释放过程中,需避免机械手臂与晶圆、目标台面发生碰撞,同时确保晶圆释放后无偏移、无划痕,吸附孔直径控制在2mm-3mm的设计,可减少晶圆背面的吸附印记,保障晶圆外观完好。
三、配合关键:精度与稳定性控制
半导体制造对转运精度和稳定性的要求极高,二者的配合需通过多重控制手段,规避各类风险,核心关键点如下:
• 精度协同控制:机械手臂的定位精度(亚微米级)与陶瓷吸盘的平面度、吸附精度深度匹配,机械手臂负责宏观定位,陶瓷吸盘负责微观贴合,二者通过控制系统联动校准,确保晶圆在吸附、转运、释放过程中,位置偏差不超过1μm,满足晶圆加工、检测的高精度需求。同时,机械手臂的关节部位采用陶瓷-金属复合结构,兼顾轻量化与抗疲劳性,进一步提升定位稳定性。
• 真空稳定性保障:机械手臂的真空系统与陶瓷吸盘的气道密封性能高度适配,管路接口采用密封设计,防止负压泄漏;真空传感器实时反馈数据,控制系统动态调节负压值,应对不同厚度、材质的晶圆(如硅晶圆、玻璃基板),确保吸附力稳定。部分设计中,陶瓷吸盘采用“鱼骨形气道”等优化结构,进一步提升吸附力的均匀性,减少真空泄漏概率。
• 无损防护配合:陶瓷吸盘表面光滑无毛刺,且部分吸盘会搭配弹性材质缓冲层,可缓冲机械手臂对接时的轻微冲击力,避免划伤晶圆;机械手臂的运动轨迹经过精准规划,全程无多余动作,与吸盘协同实现“零接触损伤”——既避免晶圆与机械手臂直接接触,也防止吸附力过大导致晶圆破损,尤其适配300mm及以上大尺寸晶圆的转运需求,解决传统转运方式中真空泄漏、晶圆损伤的痛点。
• 洁净度适配:机械手臂与陶瓷吸盘均采用无颗粒脱落、易清洁的材料,表面经过特殊处理,可避免产生粉尘污染晶圆;配合过程中,真空管路的气流经过过滤,防止杂质进入吸盘微孔,确保半导体制造所需的超洁净环境,避免0.1微米级的灰尘导致晶圆报废。
四、配合优势与应用场景
二者的协同配合,完美解决了半导体薄脆工件转运中的核心痛点,形成了独特优势:适配性强,可通过调整吸盘位置、吸附力,适配不同尺寸、翘曲程度的晶圆;稳定性高,耐高温、耐腐蚀、抗静电,可在复杂工艺环境中长期稳定工作;损伤率低,均匀吸附+精准定位,有效降低晶圆划痕、破损、吸附印记等问题,保障工艺良率;洁净度高,无颗粒污染,满足半导体制造的严苛洁净要求。
其核心应用场景覆盖半导体制造全流程,包括晶圆减薄、划片、清洗、检测、搬运等工序,同时也可用于面板制造中玻璃基板、OLED面板的转运,是高端精密制造中不可或缺的协同组合,目前高端市场虽由日本、德国企业主导,但国内企业已逐步实现产品国产化,推动配合精度与稳定性持续提升。
